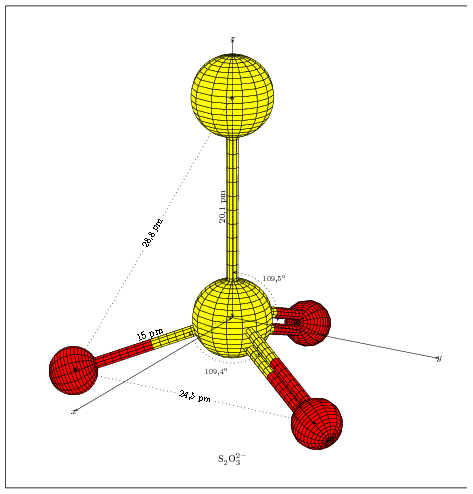
\documentclass{article} \usepackage{pst-eucl,pst-solides3d} \begin{document} \pagestyle{empty} \psset{unit=2} \begin{center} \begin{pspicture}(-4,-3)(4.5,5.5) \psset{lightsrc=100 10 -20,lightintensity=3,viewpoint=200 30 20 rtp2xyz,Decran=40,} \psframe(-4,-3)(4.5,5.5) {\psset{linewidth=0.5\pslinewidth} \codejps{ /Soufre1 {3.56 [20 16] newsphere dup (Yellow) outputcolors} def /Soufre2 {3.56 [20 16] newsphere {0 0.000 20.10 translatepoint3d} solidtransform dup (Yellow) outputcolors} def % Liaison simple /LiaisonR { 7.5 0.5 15 [10 10] newcylindre dup (Red) outputcolors } def /LiaisonY { 0 0.5 7.5 [10 10] newcylindre dup (Yellow) outputcolors } def % fin Liaison simple /Liaison{LiaisonR LiaisonY solidfuz} def /Ox {2.17 [20 16] newsphere {0 0 15 translatepoint3d} solidtransform dup (Red) outputcolors} def /LO { Liaison Ox solidfuz} def /LO1 { LO {0 -109.5 0 rotateOpoint3d} solidtransform } def /LOx1 { LO1 {0 0 120 rotateOpoint3d} solidtransform } def % fin liaison simple S-O % Liaison double S=O /LiaisonD1 {Liaison {-0.75 0 0 translatepoint3d} solidtransform} def /LiaisonD2 {Liaison {0.75 0 0 translatepoint3d} solidtransform} def /LiaisonDD { LiaisonD1 LiaisonD2 solidfuz} def /LiaisonDOx {LiaisonDD Ox solidfuz} def /LiaisonDOx1 {LiaisonDOx {0 -109.5 0 rotateOpoint3d} solidtransform } def /LiaisonDOx2 {LiaisonDOx1 {0 0 -120 rotateOpoint3d} solidtransform } def /LO12 { LiaisonDOx1 LiaisonDOx2 solidfuz} def /LO123 {LO12 LOx1 solidfuz} def % liaison simple S-S /L4 { 0 0.5 20.10 [16 10] newcylindre dup (Yellow) outputcolors } def /S1L4{ Soufre1 L4 solidfuz} def /S1S2L4{ S1L4 Soufre2 solidfuz} def /S2O3 { S1S2L4 LO123 solidfuz} def S2O3 drawsolid**} \axesIIID(0,0,0)(25,20,25)} \psPoint(0,0,20.1){S2} \psPoint(-14.14,0,-5){O1} \psPoint(7.07,-12.24,-5 ){O2} \psPoint(7.07,12.24,-5 ){O3} \pcline[linestyle=dotted]{<->}(O2)(O) \aput{:U}{15 pm} \pcline[linestyle=dotted]{<->}(O)(S2) \aput{:U}{\small 20,1 pm} \pcline[linestyle=dotted]{<->}(O2)(O3) \lput*{:U}{\small 24,5 pm} \pcline[linestyle=dotted]{<->}(O2)(S2) \lput*{:U}{\small 28,8 pm} \pstMarkAngle[arrows=<->,MarkAngleRadius=0.8,linestyle=dotted]{O2}{O}{O3}{\footnotesize 109,4$^{\mathrm{o}}$} \pstMarkAngle[arrows=<->,MarkAngleRadius=0.8,linestyle=dotted]{O1}{O}{S2}{\footnotesize 109,5$^{\mathrm{o}}$} \rput(0,-2.5){$\mathrm{S_2^{\phantom{2}}O_3^{2-}}$} \end{pspicture} \end{center} \end {document}