autocrop
-1 9 setxrange
-6.5 1 setyrange
35 setxunit
10 setfontsize
/A {.35 -.25} def
/B {3 -1} def
/C {5 -3.5} def
/D {5.5 -5.5} def
/alpha -30 def
/V {alpha cos alpha sin 2 mulv} def
[xmax 0 0 0 0 ymin] ligne
/fillstyle {fill} def
/objet {
gsave
currentpoint translate
0 0 .5 .25 frame*
grestore
} def
/objet_dim {0 0 jtoppoint .5 .25 jtoppoint} def
gsave
0 .2 stranslate
[0 0 1 0] (->) ligne
-.2 -.2 stranslate
[0 0 0 -1] (->) ligne
grestore
%% a l'origine
A (objet) ccpict
%% a l'intant t
B {alpha} (objet) ccpict
[B dupp 1 0 V 1 0 scalprod mulv addv] (->) ligne
[B dupp 0 1 V 0 1 scalprod mulv addv] (->) ligne
[B dupp V addv] (->) ligne
C () {-70} (objet) crpict
D () {-90} (objet) crpict
%% le parachure ouvert
gsave
D stranslate
0 180 0 .7 .5 Cercle
[-.5 .7 .5 .7] ligne
[-.5 .7 0 0 .5 .7] ligne
[-.25 .7 0 0 .25 .7] ligne
grestore
%% la trajectoire
.5 setlinewidth
[A .. B {alpha dir} .. {-70 dir} C] draw
%% le parachute en train de s'ouvrir
/fillstyle {blanc fill} def
/arg {argc} def
gsave
C stranslate
20 rotate
[O {90 dir} .. -.4 .7 {100 dir} 2 2 .4 .7 {-100 dir} .. {-90 dir} O] draw*
[.25 .7 .1 .4] ligne
[.1 .8 .05 .4] ligne
[-.1 .8 -.05 .4] ligne
[-.25 .7 -.1 .4] ligne
grestore
<tex>
\vbox {\hsize 40mm
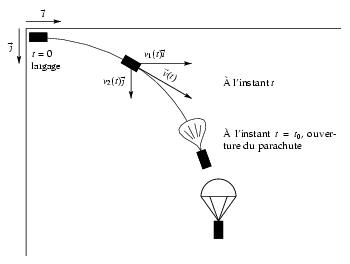
\` A l'instant $t = t_0$, ouverture du parachute
}
</tex>
5.5 -3.2 crtexlabel
<tex>
\` A l'instant $t$
</tex>
5.5 -1.5 crtexlabel
<tex>
$t = 0$
</tex>
.05 -.7 crtexlabel
setTimes
(largage) .05 -1.1 crtext
<tex>
$\vec \imath $
</tex>
.5 .2 uctexlabel
<tex>
$\vec \jmath $
</tex>
-.2 -.5 cltexlabel
<tex>
$v_2 (t) \vec \jmath $
</tex>
3 -1.5 cltexlabel
<tex>
$v_1 (t) \vec \imath $
</tex>
3.7 -1 uctexlabel
<tex>
$\vec v (t) $
</tex>
4 -1.5 () {alpha} uctexlabel
|
 Les fichiers de Syracuse sont mis à disposition (sauf mention contraire) selon les termes de la Licence Creative Commons Attribution - Pas d’Utilisation Commerciale - Partage dans les Mêmes Conditions 4.0 International.
Les fichiers de Syracuse sont mis à disposition (sauf mention contraire) selon les termes de la Licence Creative Commons Attribution - Pas d’Utilisation Commerciale - Partage dans les Mêmes Conditions 4.0 International.